⚠必读:
机器人型号均为Aelos_smart,raspberrypi版本,可通过替换version.hex文件在PRO设备上使用
如果您有意见或建议,请发邮箱至everfades1218@gmail.com
在使用Typora阅读前,请将文件→偏好设置→Markdown→内联公式 勾选上,以免显示出错!
感谢您阅读本文章!
自动:
1.把路由器的两根网线分别接到电脑和自动机器人上。
2.连接自动机器人的USB串口,并启动自动机器人,等待自动机器人胸前灯变蓝。
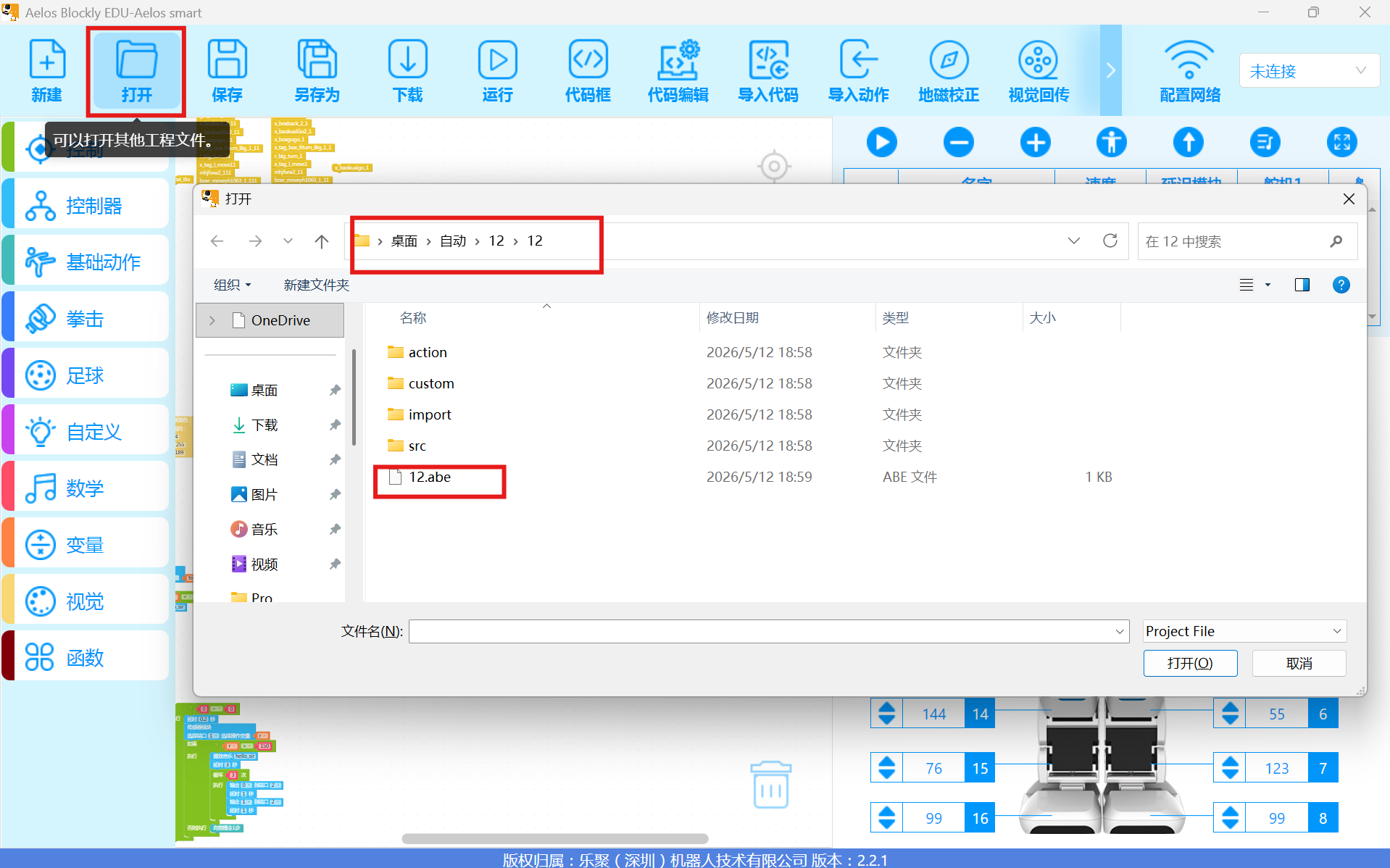
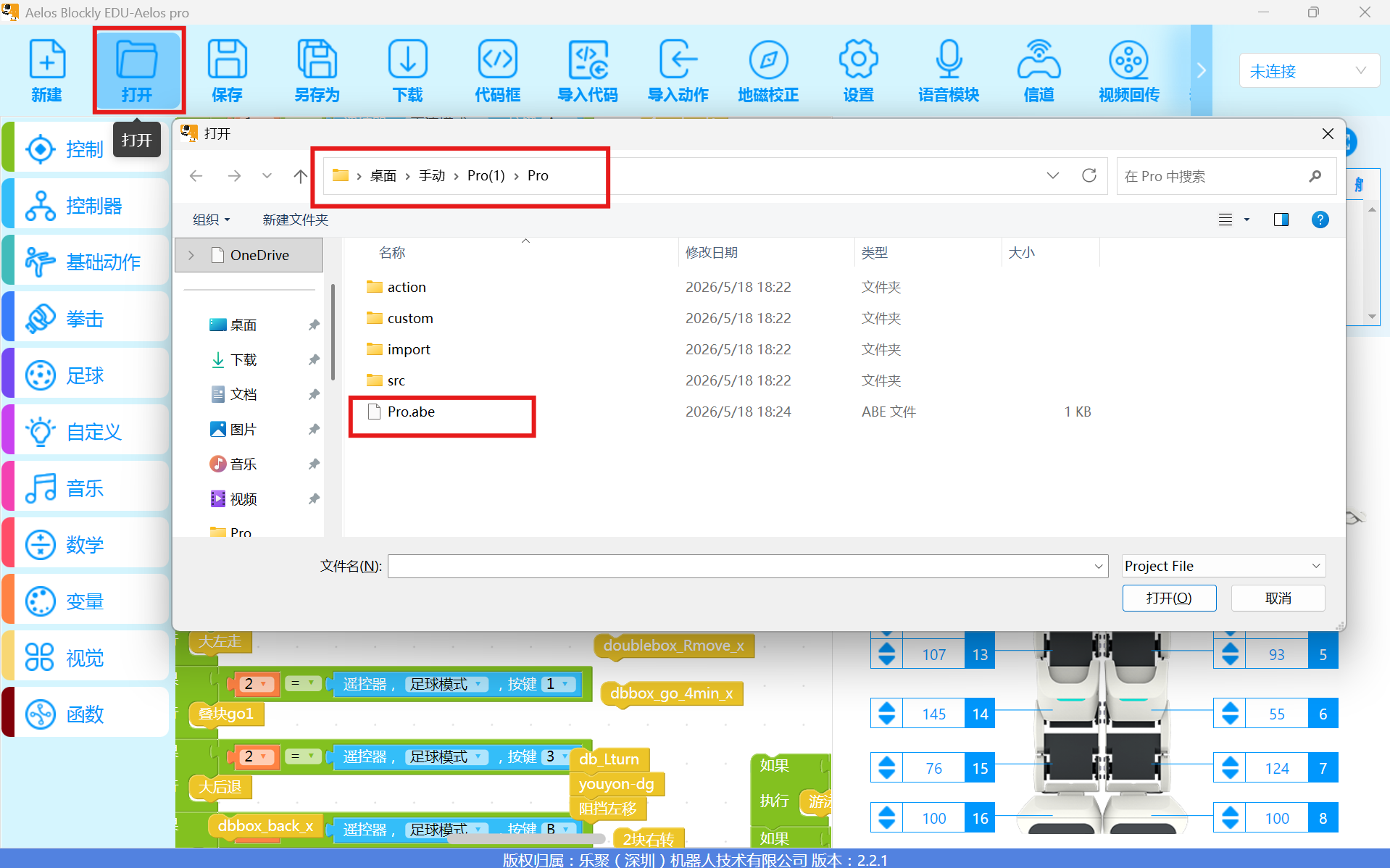
3.双击启动桌面的”aelos_edu”软件,点击”打开”,并选择图中路径下的文件
4.点击右上角的”未连接”,在下拉框中点击”COM4″。
5.双击启动桌面的”MobaXterm”,双击启动192.168.0.103(autoIP)这个session。
6.回到”aelos_edu”,点击”配置网络” -> “手动输入ip”,输入192.168.0.103,如果连接不上,先检查胸前灯是否变色,等待变蓝后再次连接。
7.依次点击”保存”,”下载”,”离线下载”按钮。点击右上角”COM4″,选择断开,即可断开串口
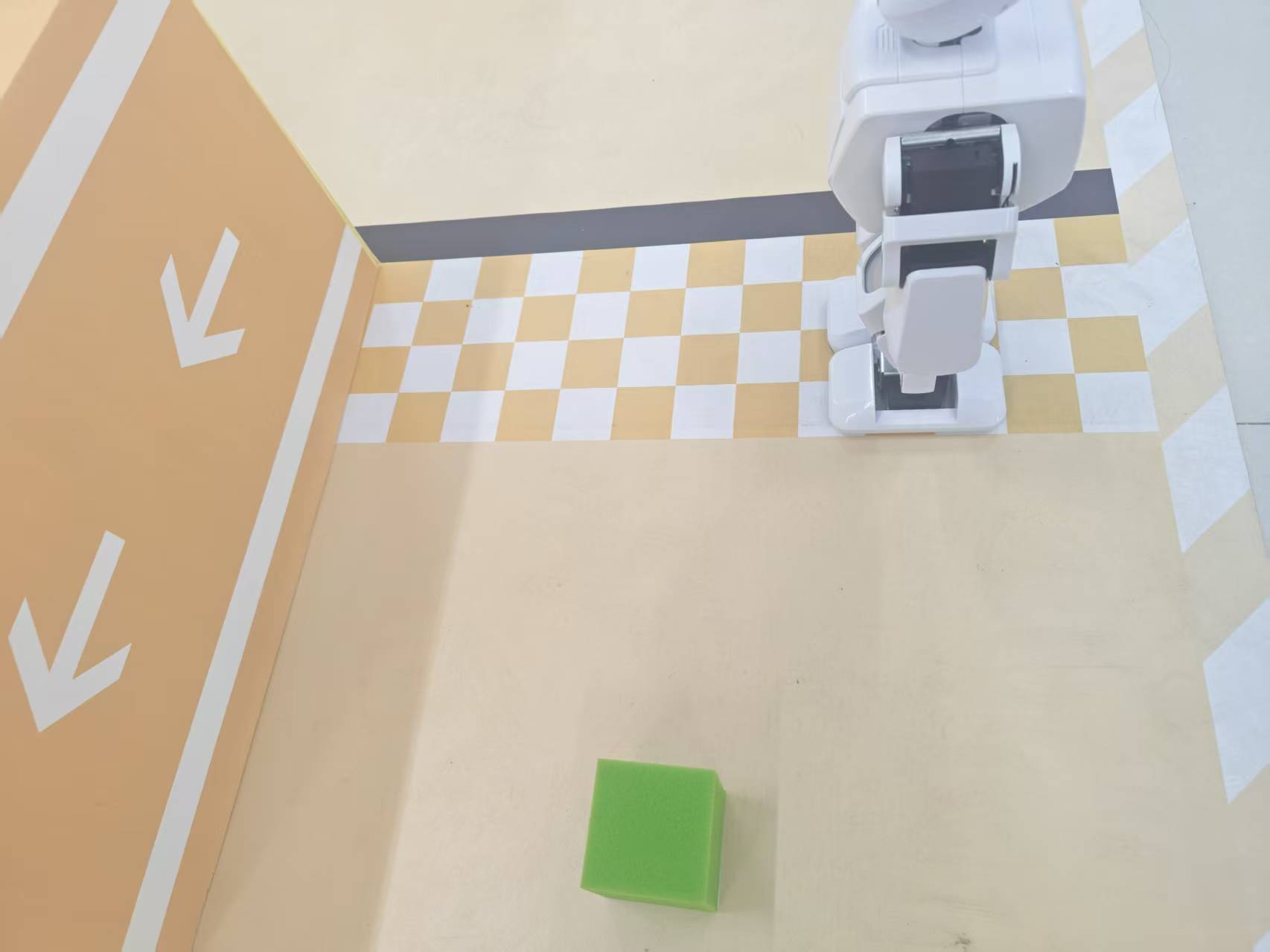
8.将自动机器人放在如图所示的位置,3~4格左右
9.回到”MobaXterm”,输入”cd /home/lemon/catkin_ws/src/aelos_smart_ros/contest_code/botec/”
10.第一次启动,输入python3 r.py并回车即可启动自动机器人。
11.在把块搬运到大本营后,机器会假装死机,向裁判申请复位,第二三四趟起步都按照这个位置摆,可以一次性最多拿四个块。

12.如果想从第一趟重新开始,请确保”/home/lemon/catkin_ws/src/aelos_smart_ros/contest_code/botec/xiuxi.txt”中的数字是”0″,如果不是,把原来的数字删掉,改成0并保存。再输入python3 r.py即可重新从第一趟启动。
手动:
1.选择图中文件
2.点击右上角,连接串口
3.电脑和机器人都连接到路由器,将灰色网线插到墙上,浏览器访问192.168.0.1进入腾达路由器管理界面。
4.左侧菜单栏挨个找一找,找到名为 raspberry的设备,复制IP地址
5.打开”MobaXterm”,打开这个IP对应的Session,输入以下命令:sudo nmcli dev wifi connect 到底有多强 password 12345678
6.连接成功后再输入以下命令:ifconfig,找到位于最下面的IP地址,复制
7.回到”aelos_edu”,点击”配置网络” -> “手动输入ip”,粘贴刚复制的IP
8.依次点击”保存”,”下载”,”离线下载”,都点击完后点击”信道”,将值设置为88
9.点击reset键即可使用